Московский государственный университет им.М.В.Ломоносова
научная конференция «ЛОМОНОСОВСКИЕ ЧТЕНИЯ»
апрель, 2009 год
СЕКЦИЯ АСТРОНОМИИ И ГЕОФИЗИКИ
ЭФЕМЕРИДНОЕ И МАТЕМАТИЧЕСКОЕ
ОБЕСПЕЧЕНИЕ ПО НЕБЕСНОЙ МЕХАНИКЕ И АСТРОМЕТРИИ В ИНТЕРНЕТЕ
ст. науч. сотр. отдела
астрометрии и службы времени ГАИШ МГУ
Чазов В.В.
Во всемирной паутине на
странице с адресом
http://vadimchazov.narod.ru/index.html
размещены исходные тексты
вычислительных программ, загрузочные модули программного приложения и подробные
инструкции пользователя для решения задач моделирования поступательного
движения космических аппаратов с учётом рекомендаций Международного
астрономического союза.

Выбор объекта в списке по заданному критерию.
Предлагаемое программное
приложение
1. работает с начальными данными,
известными в различных форматах,
2. вычисляет положения и скорости
космических аппаратов с точностью, не уступающей точности начальных данных,
3. улучшает начальные данные на основе траекторной
информации.
В состав исходных данных алгоритма
входят рекомендации Международного астрономического союза об использовании
числовых значений астрономических постоянных и о системах отсчёта
пространства-времени [1] и рекомендации Международной службы лазерной локации
по составу ускорений, возмущающих движение спутника [2]. При создании
алгоритмов использованы числовые значения коэффициентов модели гравитационного
поля Земли JGM3 [3], численная теория движения больших планет, Луны и Солнца DE405/LE405 [4] и Опорный каталог Тихо [5],
содержащий положения, собственные движения и оценки яркости почти одного миллиона
звёзд.

Фрагмент звёздного неба.
Для описания движения
спутника приняты во внимание возмущения, обусловленные гравитационным полем
Земли, притяжением Луны и Солнца, приливными деформациями упругой Земли и
океаническими приливами. Учтены также влияние светового давления и эффект
захода объекта в тень Земли. Алгоритм включает два свободных параметра, зависящих
от формы и ориентации искусственных спутников Земли – эмпирический коэффициент
отражения и коэффициент эмпирического ускорения.
Начальные параметры
движения космических аппаратов доступны пользователям в форме либо средних [6],
либо оскулирующих кеплеровских
элементов орбиты [7].
В модели поступательного
движения искусственных спутников Земли использована промежуточная орбита,
построенная на базе точного решения обобщённой задачи двух неподвижных центров.
В формулах полностью учтены возмущения, обусловленные второй, третьей и,
частично, четвёртой зональными гармониками гравитационного поля Земли [8]. Числовые
значения начальных параметров такой промежуточной орбиты близки, с одной
стороны, числовым значениям средних кеплеровских
элементов, и позволяют, с другой стороны, получить значения оскулирующих
кеплеровских элементов. Промежуточная орбита
обеспечивает точность прогнозирования положений космических аппаратов не хуже 1
км на интервале времени 10 суток.
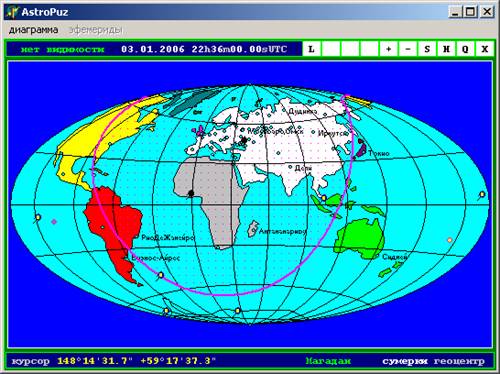
Спутники на фоне карты земного шара.
В некоторых проектах
используют радарные, доплеровские или лазерные измерения. Требования по
точности возрастают и находятся на уровне от 10 см до 1 м. Для повышения
точности в предлагаемом программном приложении реализована модель движения искусственных
спутников Земли в численно-аналитической форме. Преимущества такого подхода
изложены в обзорном докладе М.Л. Лидова [9]. Неравенства,
имеющие короткий период, вычисляются аналитически, а особые слагаемые
возмущающей функции – долгопериодические, резонансные и вековые – включаются в
осреднённый гамильтониан – основу численного интегрирования осреднённых
уравнений движения.
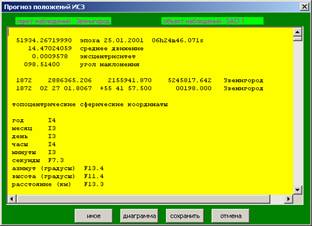
Функциональные
возможности программного приложения проверены с помощью массива высокоточных
измерений топоцентрических дальностей до пяти геодезических спутников [10]. Использованы
начальные параметры движения в форме средних кеплеровских
элементов орбиты [11]. С помощью численно-аналитической модели были получены
значения топоцентрических дальностей, а затем образованы невязки, то есть разности
между измеренными и вычисленными величинами. Самые большие значения таких
разностей совпадают с погрешностью вычисления положения спутника вдоль
траектории движения. В таблице представлены абсолютные значения наибольших невязок.
Таблица. Оценка точности вычислений.
|
1 |
2 |
3 |
4 |
5 |
|
спутник |
высота |
5 суток |
60 суток |
5 суток |
|
Стелла |
800 км |
200 м |
6000 м |
25.0 м |
|
Старлет |
900 км |
200 м |
6000 м |
25.0 м |
|
Эйджисаи |
1500 км |
100 м |
500 м |
20.0 м |
|
Лагеос |
6000 км |
50 м |
100 м |
15.0 м |
|
Эталон-1 |
19500 км |
50 м |
70 м |
15.0 м |
Колонка 1 содержит название объекта,
в колонке 2 указана минимальная высота полёта в километрах. Оценки точности
восстановления орбиты с помощью начальных параметров движения на интервалах 5
суток и 60 суток представлены в колонках 3 и 4. В колонке 5 приведены максимальные
значения невязок на интервале 5 суток, полученные в процессе улучшения начальных
параметров движения.
Приложение реализовано с
помощью системы программирования Delphi под управлением операционной системы Microsoft Windows. Пользователю предоставлены следующие
возможности:
1.
выбор
пункта наблюдений на поверхности Земли и моделирование перемещения космических
аппаратов, Солнца, Луны и планет на фоне звёзд,
2.
выбор
звёзд по трассе прохождения спутника над пунктом наблюдений для калибровки
измерительных приборов,
3.
вычисление
целеуказаний, графическое представление результатов
краткосрочного и долговременного прогнозов видимости,
|
|
|
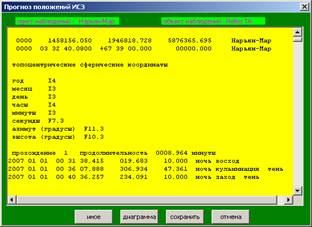
Краткосрочный прогноз видимости.
|
|
|
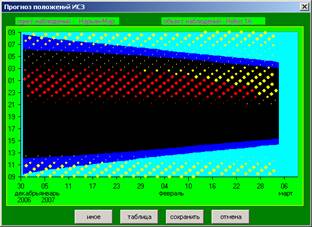
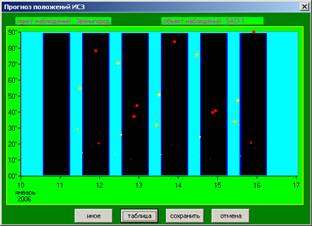
Долговременный прогноз видимости.
4.
построение
диаграмм для сравнения эффектов, обусловленных различными возмущающими
факторами,
5.
фильтрация
позиционных и дальномерных наблюдений с целью определения поправок к принятой
модели движения,
6.
определение
эмпирического коэффициента отражения и коэффициента эмпирического ускорения на
основе наблюдений,
7.
моделирование
событий восхода и захода Солнца, Луны, искусственных спутников Земли, видимых с
борта выбранного космического аппарата,
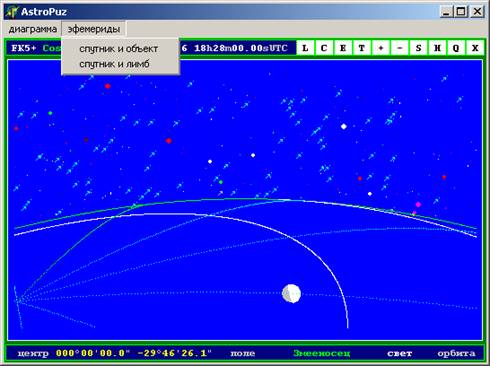
Взгляд со спутника.
8.
вычисление
установочных параметров для слежения за лимбом Земли,
9.
моделирование
перемещения спутников на фоне карты земного шара,
10. сравнение диаграмм видимости с
различных пунктов наблюдений.
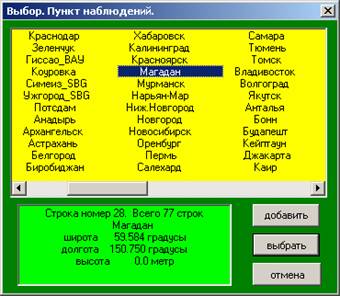
Выбор пункта наблюдений.
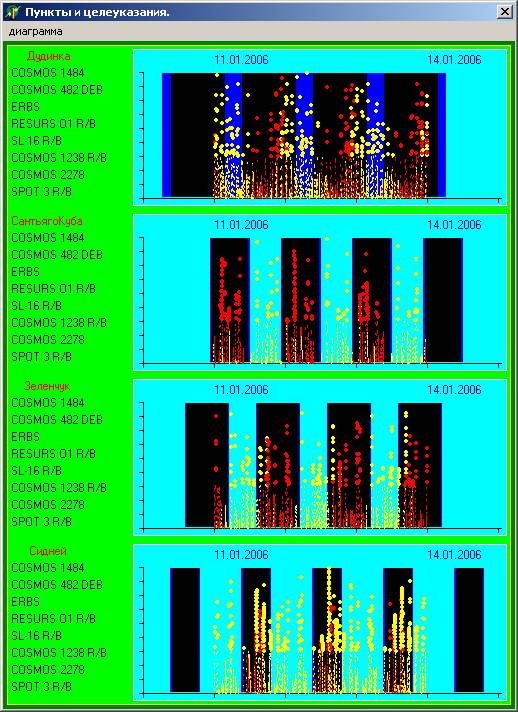
Условия наблюдений: диаграммы для сравнения.
СПИСОК ЛИТЕРАТУРЫ
1.
Resolutions of the 24th
General Assembly /IAU Information Bulletin. 2001. №88. P.28-40. (http://www.iau.org/)
2.
Ed.
D.D.McCarthy. IERS
Conventions (2000)
(http://tai.bipm.org/iers/conv2003/conv2003.html).
3.
Tapley
B.D., Watkins M.M., Ries J.C., Davis G.W., Eanes R.J., Poole S.R., Rim H.J., Schutz
B.E., Shum C.K., Nerem R.S., Lerch
F.J., Marshall J.A., Klosko S.M., Pavlis
N.K., and Williamson R.G. The Joint Gravity Model 3. //Journ. Geophys. Res. 1996. V.101.
P.28029-28049. (http://www.csr.utexas.edu/)
4.
Standish
E.M., Newhall X.X., Williams J.G. and Folkner W.F. JPL
Planetary and Lunar Ephemerides, DE405/LE405. //JPL
Inter office Memorandum. 1998. №312.F–98–048. P.1-18. (http://iau-comm4.jpl.nasa.gov/XSChap8.pdf)
5.
Høg
E., Kuzmin A., Bastian U., Fabricius
C., Kuimov K., Lindgren L., Makarov
V., Röser S. Tycho
Reference Catalogue //Astron. Astrophys. 1998. V.335.
P.L65.
6.
Brouwer D.
Solution of the problem of artificial satellite theory without drag. //Astron.
J. 1959. V.64. №9. P.378-397.
7.
Эльясберг П.Е. Введение
в теорию полёта искусственных спутников Земли. М., Наука. 1965.
8.
Аксёнов Е.П., Гребеников
Е.А., Дёмин В.Г.
Обобщённая задача двух неподвижных центров и её применение в теории движения
искусственных спутников Земли. //Астрон. ж. 1963. Т.40. №2. С.363-372.
9.
Лидов М.Л.
Полуаналитические методы расчёта движения спутников //Труды ИТА АН СССР. 1978.
Т.17. С.54-61.
10.
ILRS Normal Point Format. (http://ilrs.gsfc.nasa.gov/).
11.
NORAD two-line elements. (http://celestrak.com/NORAD/elements/).